 来卡车之家App
来卡车之家App及时获取
最新卡车资讯
来卡车之家App【卡车之家 原创】未来的卡车是什么样子?我们在汉诺威车展上看到过奔驰的自动驾驶概念车,也在美国中部卡车展上看到过弗莱纳的概念车。它们借助现有的科技技术及设备,为卡车增加了新的功能。
在这个关于未来卡车畅想的系列文章中,我们不妨以一名卡车爱好者的视角,抛开法规、国情以及成本等等的约束,利用现有的科技,一起来构建来自未来的概念卡车。

前面提到的奔驰自动驾驶概念卡车和弗莱纳的卡车,其中一个重要功能都是自动驾驶。但是这些卡车的自动驾驶功能全部都是在高速公路上,基于GPS、雷达等设备实现的自动驾驶。而对于街区的自动驾驶,因为车多拥挤,变数太大,想实现自动驾驶难度是非常大的。
● 自动泊车已经实现 卡车还要更高级
但自动驾驶并不仅限于在高速公路或街道上的自动驾驶,只是人们都将注意力集中在这两个方向而已。自动驾驶还有一种应用就是自动泊车。目前在一些高端乘用车上已经有了自动泊车的功能。
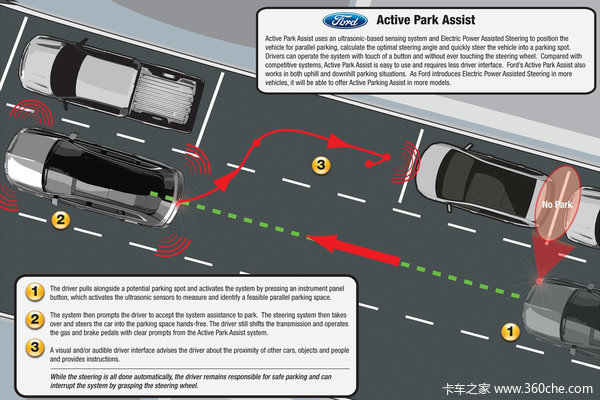
该功能通过车上的雷达等设备侦测可以容得下自身的空位,如果驾驶员接受这个位置,那么该车将会自动进入该空位,入位过程中方向盘将由系统接管。
卡车若仅仅是将自己塞进停车位是远远不够的。卡车作为生产工具,更多的时候需要在一些特定的位置停放(一般就是装卸货)。这些停车环境往往与停车位大不相同。这还说的单体车,如果是是半挂车,或全挂车,在一些空间比较局促的地方,那可能真的就是挑战了。
● 三维扫描新应用 新卡车也“长眼”
一般来讲,有经验的老司机在进入这样的场地之前,会先勘探地形,包括地面材质、坡度、障碍物等等信息。然后根据自己了解到的信息,结合自己卡车的情况(尺寸、重量等等),制定一套方案(可能还会有备用方案),然后再执行。
但很明显,并不是所有的卡车司机都是老司机,首先制定的方案可能不合理,实际执行起来遇到各种问题;其次就可能是驾驶方面经验缺乏,造成比如撞墙、挂擦等事故。

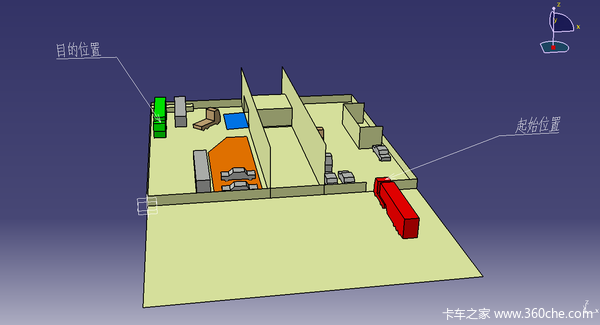
在这次的概念卡车当中,将应用三维扫描技术。在卡车进入园区卸货之前,和我们现在的方式一样,需要查看现场。驾驶员携带手持式三维扫描仪,在园区内走一圈之后,卡车的车载电脑将根据三维扫描仪取得的数据建立卸货园区的三维图像。
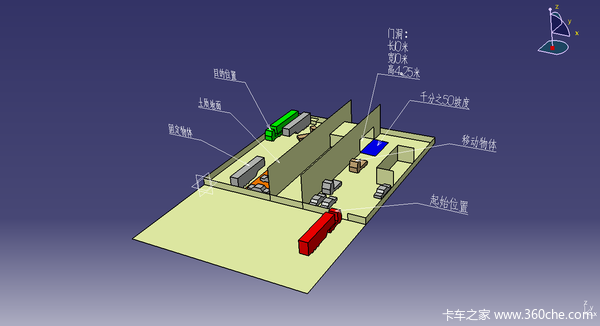
之后驾驶员需要在这个建立起来的三维场景中做一些标记,主要包括地面材质(硬化表面、沙土表面等)、硬度(能否支撑卡车的重量,是否有陷车的风险)、物体是否可以移动等等标记,最后再加上一个期望的卡车停车地点和方向。
● 卡车自动泊车 也可做有力辅助
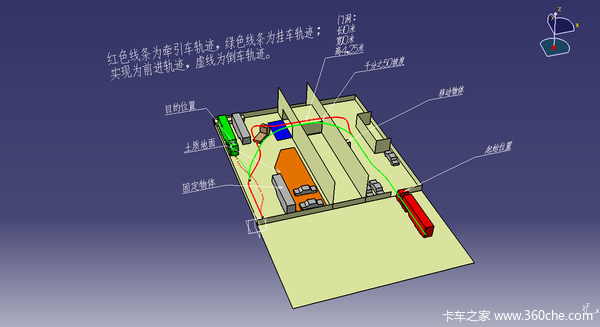
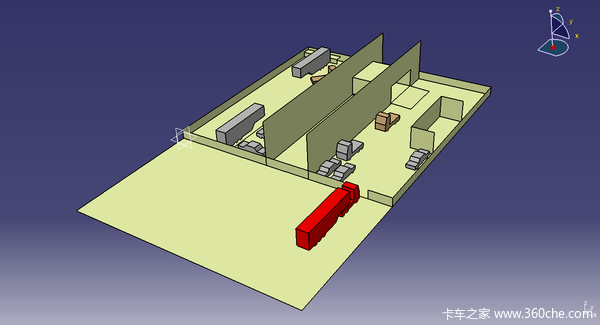
计算出的入场轨迹
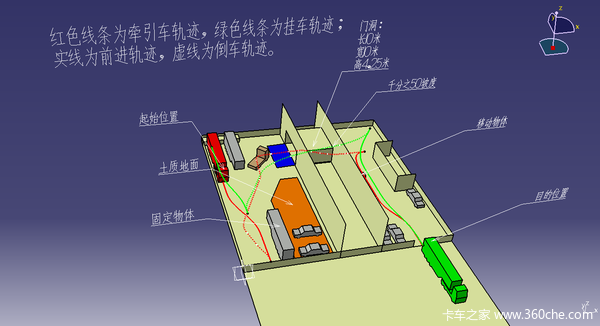
计算出的出场轨迹
之后,卡车就开始计算路线,如果无法实现,会给出提示,然后重新规划期望停车位置;否则则会开始按照计算出来的路线自动驾驶。自动驾驶的过程中,卡车周围的雷达等设备还会不间断的扫描周围场景,一方面用于实时识别卡车在场地内的位置,另一方面也会对突然出现的物体有所感知,避免发生意外。
如果驾驶员想自己动手完成,这套系统也可以作为一个得力的助手,很大程度上可以替代指挥人员、倒车雷达和倒车影像。
因为它可以实时确定自己在场景中的位置,所以现实世界的泊车完全成了《欧洲卡车模拟》——你可以在任意视角查看自己卡车的位置和姿态。而且当你的卡车即将碰上什么物体的时候,它还会及时给出提醒——比《欧洲卡车模拟》还高级。
● 编后语:
如今卡车已经被装备在发动机(ECU)、变速箱(TCU)、制动器(ABS等)上的电脑变得更经济,更智能也更安全。但这还不是全部,我们还可以将一些其他用途的电脑装在卡车上进一步提升卡车的功能。欢迎大家在本文下方留下自己的想法,我们一同探讨。(文/图 于伟峻)
● 相关阅读:
加一箱油可省126元 国内油价喜迎两连跌
我国年内第15次成品油零售价调价窗口将于8月4日24时开启.国内柴、汽油价格每吨分别降低215元和220元,全国平均来看折合0号柴油每升下调0.18元,90号... 2016年08月04日关于我们 联系我们 工作机会 网站地图 企业账号申请 广告合作| iPhone客户端 / Android客户端| 手机版 | 意见反馈
营业执照增值电信业务经营许可证广播电视节目制作经营许可证经营许可证编号:京ICP证080575号 / 京ICP备09080840号 京公网安备11010502035781号
京公网安备11010502035781号
Copyright ©2009 www.360che.com All Rights Reserved. 卡车之家 版权所有



{kind=link}
{kind=link}